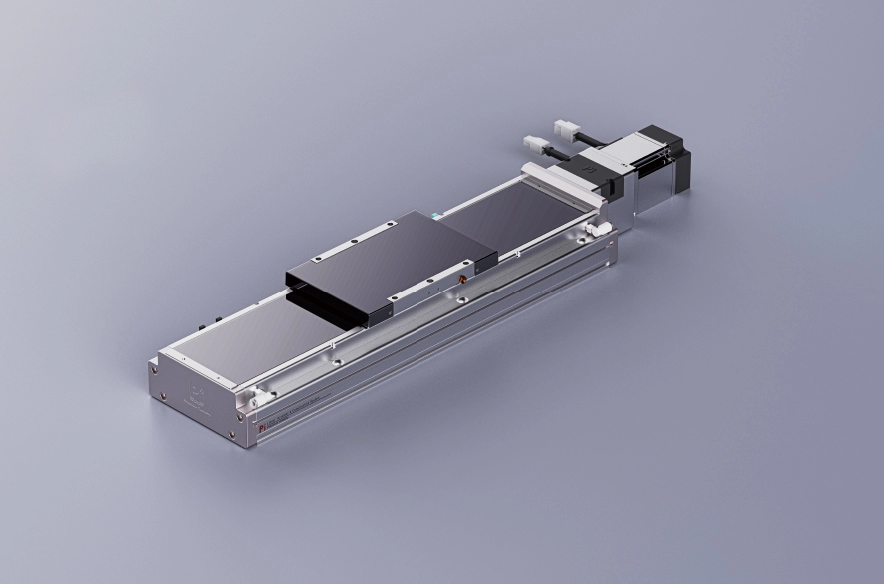
Нижняя сторона двигателя
Повторяемость: ±0,005/0,01 мм. Горизонтальная нагрузка: 110 кг. Вертикальная нагрузка: 33 кг. Максимальная скорость: 250 мм/с. Диапазон перемещения: 100–1050 мм.
 Текущее местоположение:Главная > Компания > Новости > Последние новости > Понимание требований к нагрузке, скорости и ходу для шарико-винтовых линейных приводов
Текущее местоположение:Главная > Компания > Новости > Последние новости > Понимание требований к нагрузке, скорости и ходу для шарико-винтовых линейных приводов Date: Dec 03 2025
Линейные приводы с шарико-винтовой парой являются важными компонентами точной автоматизации. Их способность обеспечивать повторяемое и точное линейное движение делает их широко используемыми в производстве полупроводников, сборке ЖК-дисплеев, обработке печатных плат, медицинском оборудовании, автомобильных системах и платформах для промышленных испытаний. Независимо от того, интегрирован ли привод в небольшие инспекционные машины или в крупные производственные линии, производительность привода во многом зависит от того, насколько требования системы соответствуют механическим возможностям привода.
С момента своего основания в 2003 году компания Ruan сосредоточила усилия на повышении промышленной точности за счет высококачественных компонентов движения. Имея два промышленных парка и более 300 сотрудников, бренд Pi специализируется на приводах, модулях позиционирования, линейных двигателях, электрических цилиндрах, роботизированных расширениях и деталях автоматизации. Этот опыт дает ценную информацию о выборе и настройке подходящего линейного привода с шарико-винтовой передачей для реальных промышленных условий.
В этой статье объясняются три наиболее фундаментальных фактора при выборе привода: нагрузка, скорость и ход. Четкое понимание этих параметров обеспечивает надежную работу машины, предотвращает преждевременный износ и повышает долговременную точность.
Нагрузка — один из первых параметров, которые должны учитывать инженеры. Привод с ШВП преобразует вращательное движение в линейное перемещение, но величина силы, которую он может выдержать, зависит от диаметра винта, шага, конструкции гайки, конструкции подшипника и жесткости рельса.
Это относится к силам, приложенным, когда привод удерживает положение. Такие применения, как вертикальный подъем, монтажные приспособления или длительные циклы удерживания, требуют высокой статической нагрузки. Если размер привода меньше, устойчивость удержания снижается, и долговременная деформация винта становится более вероятной.
Динамическая нагрузка возникает во время движения. Высокое ускорение, замедление и быстрые изменения направления создают нагрузку на винт и гайку. Приводы, используемые при перемещении, проверочном сканировании или быстром индексировании, должны выдерживать динамическую нагрузку, превышающую статическую нагрузку.
ШВП не рассчитаны на воздействие боковых сил. Боковые нагрузки должны поддерживаться линейными направляющими или внешними подшипниками. Чрезмерная боковая нагрузка может вызвать:
Повышенное трение
Неравномерный износ
Сниженная повторяемость
Меньший срок службы привода
Инженеры должны учитывать:
Вес полезной нагрузки
Инструментальная сила или сила нажатия
Инерция при ускорении
Вертикальная и горизонтальная ориентация
Любые нецентральные нагрузки или многоосные пути нагрузки.
Точно рассчитав требования к нагрузке, пользователи могут выбрать привод, который сохранит жесткость и точность на протяжении многих лет эксплуатации.
Скорость определяет, насколько быстро привод перемещается из одного положения в другое, но достижение высокой скорости и стабильности требует тщательного подбора шага винта, выбора двигателя и механической конструкции.
Больший шаг винта увеличивает расстояние перемещения за один оборот двигателя.
Высокий шаг = более высокая скорость, меньшее механическое преимущество.
Низкий шаг = более медленная скорость, более высокая точность и сила
Если приложение требует быстрого перемещения и умеренной силы, может подойти более высокий шаг. Для сверхточного позиционирования предпочтительны конструкции с меньшим шагом.
Серводвигатели обеспечивают управление с обратной связью, плавное движение и стабильность на высоких скоростях, что идеально подходит для динамической автоматизации. Шаговые двигатели подходят для среднескоростных и экономичных систем.
Более длинные винты испытывают большую вибрацию на высокой скорости, известную как биение винта. Это накладывает практические ограничения на скорость в зависимости от диаметра винта, метода опоры и расположения подшипников.
Более тяжелые нагрузки требуют более медленного ускорения, чтобы избежать нагрузки на винт и гайку.
Требуемое время цикла
Кривая крутящего момента двигателя
Настройки ускорения и рывка
Максимально допустимая скорость шнека
Необходимость плавного движения на низкой скорости (обычно в системах контроля)
Правильное соответствие требованиям скорости предотвращает резонанс, снижает износ и обеспечивает точное позиционирование.
Ход определяет, насколько далеко может двигаться привод. Этот параметр влияет на широкий спектр решений в области механического проектирования.
Полезный путь перемещения (эффективный ход) короче общей длины привода. Проектировщики должны учитывать:
Запасы безопасности в конце путешествия
Длина двигателя и муфты
Ограничения по монтажной зоне
Для более длительного хода требуется более жесткий винт и более прочный корпус. Недостаточная жесткость приводит к:
Вибрация
Сниженная повторяемость
Дрейф позиции
Неравномерное движение под нагрузкой
Для применений с длинным ходом могут быть рассмотрены конструкции поддерживаемых винтов или альтернативные технологии, такие как ременные приводы или линейные двигатели.
Более высокая частота циклов при длительном перемещении увеличивает:
Накопление тепла
Износ гаек
Расход смазки
Поэтому интервалы технического обслуживания должны быть соответствующим образом скорректированы.
Эти три параметра не являются независимыми. Вместо этого они влияют друг на друга в практических инженерных приложениях.
Эта комбинация создает сильные динамические силы. Это требует:
Больший диаметр винта
Предварительно нагруженная гайка с низким люфтом
Усиленные направляющие
Для этого необходимо:
Больший винт для предотвращения отклонения
Стабильная конструкция корпуса
Контролируемое ускорение, чтобы избежать удара
Настройка сервоуправления становится критически важной. Смазка и температурная стабильность также имеют большое значение.
Понимание того, как эти факторы работают вместе, обеспечивает долгосрочную надежность привода и производительность промышленного уровня.
Обширный опыт Ruan в области прецизионных компонентов гарантирует, что каждый привод спроектирован с учетом:
Оптимизированная геометрия винта
Корпуса повышенной жесткости
Прецизионные заземляющие рельсы
Стабильная точность перемещения
Надежный срок службы
Приложения в полупроводниках, медицинском оборудовании, ЖК-дисплеях, печатных платах и автоматизации требуют чрезвычайно надежных компонентов движения. Правильно выбранный и настроенный привод предотвращает:
Неточная сборка
Дефекты поверхности
Нестабильные результаты проверки
Снижение пропускной способности
Понимая требования к нагрузке, скорости и ходу, инженеры гарантируют, что каждый привод работает в идеальном диапазоне производительности.
Выбор линейного привода с ШВП – это не просто вопрос выбора размера или хода. Для достижения надежного движения грузоподъемность, скоростные характеристики и длина хода должны оцениваться вместе. Благодаря многолетнему опыту в области точного машиностроения, стандартизированные и индивидуальные решения для приводов Ruan позволяют промышленным пользователям удовлетворять строгие требования во многих секторах.
Принимая обоснованные решения, основанные на механических принципах, инженеры обеспечивают долгосрочную точность, сокращение затрат на техническое обслуживание и стабильную работу машины.